00 Introduction
机械臂接口主要分为以下几类:
- 机械臂基础接口 运动参数的设置与状态读取
- 机械臂参数与运动学接口 关节参数查询、正运动学与逆运动学
- 运动控制接口(见下文)
- 阻抗控制接口 关节/笛卡尔空间的柔顺控制
运动控制接口在控制环路中的位置如下图所示。
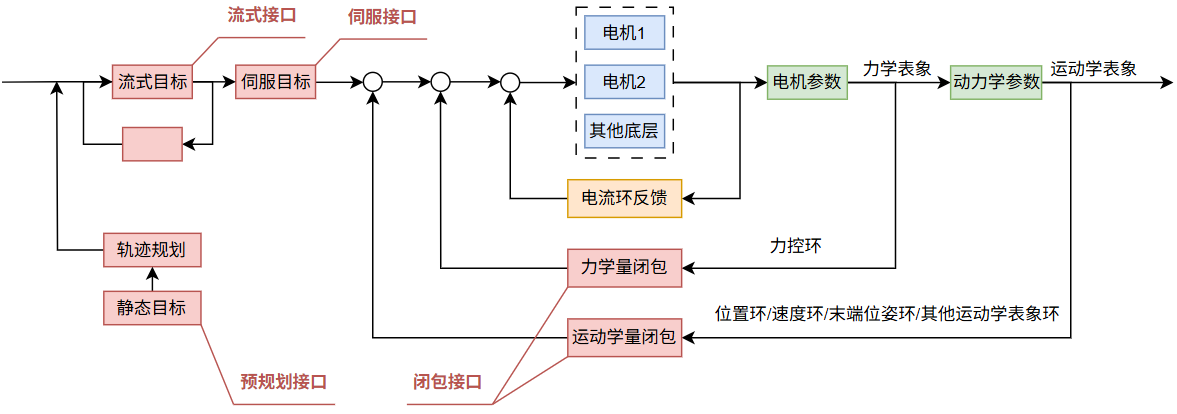
具体的,运动控制接口分为三类:
- 预规划接口 运动目标和轨迹在执行前已知
- 流式接口 运动目标和轨迹在执行前未知,在执行过程中由上位机下发,由驱动处理轨迹连续性和平滑性等问题
- 实时闭包接口 运动目标和轨迹在执行前未知,在执行前由上位机告知驱动在执行过程中如何依据机器人上一帧状态和指令生成新轨迹。
部分机器人可能不会支持上述三种运动控制接口的全部,这取决于机器人厂商对机器人指令集的暴漏程度及其机器人内部的控制方式。但是一般的,我们要求机器人至少提供预规划类接口。